


The rise of Large Language Models (LLMs) has definitively proven the credibility of Scaling Laws: larger models trained on more data yield exponentially more powerful AI. In the autonomous vehicle (AV) industry, this has triggered a race toward monolithic "End-to-End" models—black boxes that attempt to learn driving directly from raw pixels.
But applying scaling laws blindly to autonomy ignores a fundamental paradox: The better you get, the harder it gets.
As a neural network improves at driving, the data required to improve it further—the complex, long-tail edge cases—becomes exponentially rarer. Collecting this data in the real world is prohibitively expensive and slow. This is the Data Wall.
To solve autonomy, we must move beyond brute-force data collection and naive scaling of monolithic models. We need a strategy that simultaneously delivers Data Efficiency for the real world, Computational Efficiency for simulation, and Interpretability for safety certification.
The 16-Year-Old Driver Analogy
To understand true data efficiency, consider a 16-year-old learning to drive. They can master the task in a few weeks without needing millions of miles of experience. Why?
Because they are not learning from scratch.
By the time a human sits behind the wheel, they have already learned—fully unsupervised—how to perceive the world geometrically. They understand that solid objects persist, that occlusion exists, and that gravity applies. They are not processing pixel noise; they are processing geometric signal.
Teaching a monolithic neural network what pixels mean based on steering commands is wholly inefficient. The specifics of object appearance (texture, lighting, color) are the most high-dimensional part of the input, yet the least relevant for the driving task.
At Helm.ai, we replicate this human advantage using an approach we call Factored Embodied AI.
Deep Teaching: Scaling the Signal, Not the Noise
We factor the problem into two layers—Perception and Policy—unlocking a "triple dividend" of efficiency and safety.
- The Geometric Reasoning Engine (Efficiency of Understanding):
First, we decouple "seeing" from "driving." Using our proprietary Deep Teaching approach, we train large-scale Foundation Models on massive volumes of unsupervised video to build our Geometric Reasoning Engine. We do not need scarce driving data to learn the laws of physics. By learning from diverse, internet-scale video data, this engine masters the geometry of the world without being bottlenecked by fleet deployment. - The AI Planner (Efficiency of Learning):
Second, we reduce the complexity of the driving task itself. Teaching a planner to drive from raw pixels is a high-dimensional dead end. Teaching a planner to drive from Semantic Geometry is mathematically far simpler. Because the input space is lower-dimensional and "denoised," the sample complexity of learning the driving policy drops by orders of magnitude. The planner learns more from every single hour of data because it isn't wasting capacity figuring out what a "road" looks like—it only has to learn how to drive on it. - The Safety Advantage (Interpretability):
Finally, factoring the problem solves the "Black Box" certification nightmare. In a monolithic model, whether the car makes the wrong or correct decision, you often cannot explain why. In our architecture, the interface between Perception and Planning is human-readable Semantic Geometry. We can visualize exactly what the car saw and definitively isolate the cause of any failure: did the system fail to detect the object (Perception), or did it detect it but fail to yield (Policy)? This traceability is essential for ISO 26262 and SOTIF (ISO 21448) compliance and gives OEMs the confidence to deploy.
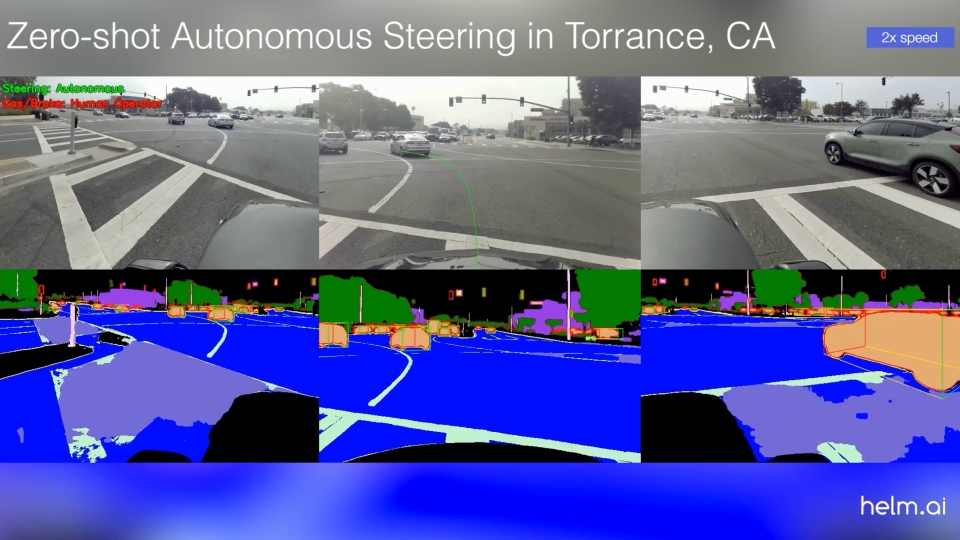
This representation captures the full high-dimensional structure of the scene: dense semantic segmentation of complex intersections, precise 3D vehicle geometry, and spatiotemporal cues regarding pedestrian intent.
Semantic Simulation: Unlocking Computational Efficiency
Deep Teaching™ factors the problem to unlock data-efficient, interpretable learning. Simulation then turbo-charges this efficiency with scale. However, the type of simulation matters.
The Computational Bottleneck of Pixel-First Simulation: Traditional End-to-End models require raw RGB inputs. While Generative AI models like our own VidGen, WorldGen, and GenSim have closed the sim-to-real gap for synthesizing photorealistic sensor data, using them to train a planner is computationally wasteful. You are forced to spend compute resources rendering a combinatorial explosion of appearance variations just to teach the model simple geometric concepts.
The Solution: Semantic Simulation offers a massive efficiency shortcut.
Because our perception engine already converts the world into a clean geometric representation, we can skip the heavy lift of rendering pixels for the planner. We train our driving policy directly in Semantic Space.
In this geometric view, the visual "Reality Gap" vanishes. A simulated lane line is mathematically identical to a real lane line. This allows us to train on infinite simulated scenarios at warp speed, focusing our compute purely on Policy Learning rather than visual rendering. This is the ultimate expression of Computational Efficiency: solving the driving task without being bogged down by the visual noise.
Crucially, this pre-training in simulation exposes the AI planner to critical concepts and corner cases before it ever sees the road. This means that when we fine-tune on real data, the model has better initialized features, allowing it to learn significantly more from every hour of real-world driving.
The 1,000 Hour Benchmark
To prove this thesis, we deployed our AI Driver in Los Angeles (Torrance)—a complex urban environment we never trained for.
Video 1: Helm.ai vehicle navigating complex LA intersections, performing human-initiated lane changes, and handling turns without steering disengagement.
The AI Driver handles autonomous steering for straight roads, lane changes, and turns at intersections Zero-Shot. It was not trained on these specific streets.
But the breakthrough isn't just that it drove; it's how it learned.
To achieve this level of performance, we trained our planner using simulation and only 1,000 hours of real-world driving data.
In an industry where companies rely on data scale, this result validates that the synergy of Geometric Reasoning and Scalable Semantic Simulation is the key to breaking the Data Wall. We reduced the sample complexity of learning by orders of magnitude.
Proof of Universality: The Mining Stress Test
If our Geometric Reasoning Engine is truly stripping away noise to find the signal, it should be adaptable to anywhere, even domains outside of driving.
To stress-test this, we applied the exact same perception backbone used to train our automotive perception stack to an Open-Pit Mine.
Video 2: Helm.ai's universal perception in an open-pit mine.
Because our backbone had already learned the Universal Priors of geometry via Deep Teaching™, we achieved production-grade results with extreme data efficiency. By fine-tuning on a tiny fraction of the data typically required, the model correctly identified traversable surfaces and obstacles in this alien environment.
This confirms the power of the Foundation Model paradigm: The "eyes" of the system are pre-trained on the physics of the world, making the adaptation to a new vertical (like mining) a matter of days, not months.
Closing the Loop: The World Model
Our Geometric Reasoning Engine already perceives the dynamic world in real-time. But to navigate it safely, we must go beyond perception to prediction.
To close the loop, we are building the next generation of World Models that leverage this geometric understanding for two critical tasks:
- Predicting Intent: By projecting "ghost trails" in semantic space, the model anticipates the future actions of dynamic agents (like the yielding biker), enabling the planner to negotiate complex interactions.
- Generative Simulation: Because the model understands the causal physics of the world, it can generate infinite, realistic adversarial scenarios in semantic space. This creates a data flywheel: the World Model dreams up new corner cases, the Simulator trains the Planner on them, and the Planner becomes more robust without needing more real-world miles.
Video 3: World Model prediction in Segmentation Space showing "ghost trails" of future agent movement.
The Path Forward
The path to L4 autonomy isn't about driving more miles than anyone else. It's about knowing as much as possible before you get on the road, so that you can learn more from every mile.
By combining the power of Geometric Reasoning and Semantic Generative Simulation, Helm.ai's Factored Embodied AI achieves interpretable generalization with orders of magnitude less data. We aren't just scaling the dataset; we are scaling the intelligence.